Myth #3: Cylinder Regeneration is Always a Good Design Goal
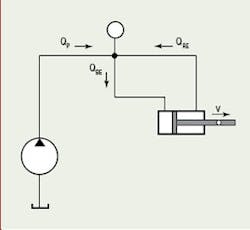
The purpose of the so-called cylinder regeneration circuit, shown in Figure 1, is to extend the piston faster than if the pump output were acting directly on the cap end area. It is generally known that the speed of extension is the pump flow divided by the cross-sectional area of the rod:
v = QP / Arod
where:
v is piston velocity
QP is pump output flow, and
Arod is cross-sectional area of the cylinder rod.
This equation tells us that the smaller the rod diameter (area), the faster the speed of extension. The reason is that the flow from the rod end is forced to combine with the pump flow to create the considerably larger cap end flow. The result is the regenerated extension speed.
But just as the speed is affected by the area of the rod, so is the force, however severely diminished. The force generated by the cylinder while regeneratively connected is given by:
F = P × Arod
where:
F is force and
P is pressure
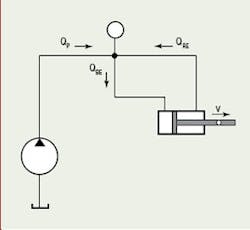
Another way of looking at it is that the effective cylinder areas can be altered merely by changing an external valve position or configuration — by switching from, say, a four-way connection to the regenerative connection shown in Figure 1. This increases the attractiveness of the configuration. The speed-of-extension advantage is why the regenerative circuit has found many useful applications. Clearly, the limited available force is a disadvantage. The purpose of this discussion, however, is to explore that condition under which the first equation does not apply. The condition is more subtle, yet completely predictable.
The right conditions
The condition under which the regenerative promise is not kept is described in two ways, although there is but one actual condition. First is the condition where the load and piston are acceleration limited. The second way of saying it is that the load and piston have too low a hydromechanical resonant frequency, or, more simply, the resonant frequency. No matter which description is used, these features are present in such dynamically limited hydromechanical systems:
• the rod diameter is small,
• the load is massive,
• the commanded acceleration is too high, or
• all of the above.
When the above conditions exist, if you “shape” the incoming flow, the actual rise in actuator speed will not follow the rise in input flow. Therefore, we say the system is acceleration limited. Shaping the incoming flow is normally done by controlling how fast the control valve opens. Also, when acceleration limited, the extension and stopping of the cylinder-load combination is springy and prone to generating noise at acceleration and deceleration times.
This raises the question, “How can the piston speed not follow the input flow?” The answer lies in understanding fluid compressibility and its inevitable handmaiden, hydromechanical resonant frequency. We often refer to hydraulic fluids as being incompressible. In fact, they are not.
Bulk modulus is that fluid parameter that is used to measure the compressible nature of liquids. Actually, it is a measure of the fluid’s incompressibility — the higher the bulk modulus, the stiffer, or less compressible the fluid. The typical value of bulk modulus for mineral-based hydraulic oil is approximately 200,000 lb/in.2
Water, on the other hand, is closer to 300,000, making it 50% stiffer than oil.
What resonates?
Hydromechanical resonance is calculated by first determining the hydraulic capacitance, a circuit parameter. Hydraulic capacitance is usually calculated as the pressurized fluid volume divided by bulk modulus. The circuit configuration affects how the two volumes on the cap and rod ends of the cylinder interact with one another to form the capacitance. This interaction in turn, profoundly affects the resonant frequency. It is this difference that separates the regenerative circuit from the more conventional four-way connected cylinder.
Springiness arises in systems with small areas, high mass loads, and high accelerations because of the hydromechanical resonant frequency. Resonance generally occurs when potential and kinetic energy can exchange. In the hydraulic system, kinetic energy is stored in the moving mass load, and potential energy is stored in the compressed fluid. As the cylinder accelerates, the fluid compresses under rising pressure, storing potential energy, and kinetic energy is stored in the mass as it gains speed.
At some point, acceleration goes down, the pressure reduces, and the energy of compressibility causes a slight overspeed condition. This causes the kinetic energy in the mass to rise, resulting in a further reduction in potential energy in the fluid, and ad infinitum, the motion is springy and oscillatory as extension occurs. In other words, the fluid acts like a simple spring.
This is the condition of being acceleration limited, or hydromechanical resonant limited operation. Too often, the method used to correct the problem is to slow the entire system down, reducing productivity. The whole issue can be mitigated or eliminated at the outset, when circuit designers calculate the hydromechanical resonant frequency. The formula is:
fn= A 2π (MCH)½
where:
fn is hydromechanical resonant frequency in Hz
A is the effective cylinder area I = the total mass of the load on the cylinder divided by the gravitational constant, G, and
CH is the hydraulic capacitance for the circuit in question.
The problem with the regen circuit is that it will not behave as desired (smooth, high speed extension) except when the acceleration time is long relative to the period of the hydromechanical resonant frequency. This is unfortunate because the conditions necessary to achieve desired motion are easily calculated before selecting hardware — and costs escalate after components have been assembled into a system. The period of the hydromechanical resonant frequency is merely the reciprocal of the frequency:
TN = 1 fn
where:
TN is the hydromechanical resonant frequency
Acceleration time, as a first approximation, can be estimated as the time used to shift the control valve, or, to change the stroke of a variable displacement pump.
The symptoms of the poorly behaved regeneration circuit is that the load and piston extend in an oscillatory manner, and stop with a definite springiness — often producing audible noise.
If the control is done manually by human operators, the usual reaction is that they will almost “automatically” slow down the control action when the springiness is observed. This may achieve the desired smoothness of operation, but it also slows the machine cycle and reduces productivity. If the valve is controlled electronically, say with an electronic motion controller, then you should be using the rule of thumb that the acceleration time should be longer than three times the value calculated in the equation above.
Back to resonant frequency
The problem with the regenerative circuit configuration is that the area, A, evaluates to the rod cross sectional area. This is a very small value. But there is a double whammy because the hydraulic capacitance, CH, in the denominator, is at its highest value of all possible cylinder circuits.
The volume that comprises the capacitance consists of the sum of the volume on the cap end of the cylinder plus the volume on the rod end. In other words, capacitance effect is formed from the total volume of the cylinder tube, minus the small amount occupied by the rod, divided by the fluid’s bulk modulus. This is the major disadvantage of the regenerative cylinder circuit.
The capacitance and resonant frequency vary, depending on the position of the piston, because the total fluid volume varies. The maximum capacitance, — therefore, the lowest resonant frequency — occurs with the cylinder at or near full extension. It is lowest with the piston fully retracted because that is when the greatest amount of rod volume is inside the cylinder tube.
It should be apparent from the discussion so far that the lower the resonant frequency, the longer the period of that frequency and the more slowly acceleration must take place if smooth motion is to ensue. Low resonant frequency is at cross purposes to high cycle rates and high machine productivity.
The mass of the load, M, is the dead weight divided by G, the gravitational constant. It could be the knife carriage in a flying cut-off application, or a bucket full of gravel in a front-end loader. In either case, the larger the load mass, the lower the resonant frequency.
To put the resonant frequency into perspective, the regeneration circuit must be compared to the resonant frequency when the cylinder is connected to a four-way valve in a conventional manner. The mathematical proof of the resonant frequency for the four-way connected cylinder is too complex to be reviewed here. However, several authors have come to essentially the same conclusion: the four-way connected cylinder configuration has the highest resonant frequency. It has further been shown that the hydraulic capacitance with the four-way connection maximizes when the piston is in approximately the mid-stroke position. This mid-stroke position, then, becomes the point of minimum resonant frequency and can be compared to the same load and stroke length, rod diameter, and bore of a cylinder configured for regenerative operation.
Figuring ratios
When the fluid volume contained in the plumbing leading to the cylinder is small compared to the volume contained within the cylinder, it can be shown that the approximate ratio of the resonant frequency with the regenerative connection to the resonant frequency with the four-way connection is estimated with:
fnR fn4W = 2(ρ C1) (1+ρ C)(1+√ρ C)
where:
fnR is the hydromechanical resonant frequency of the load and cylinder with the regenerative connection,
fn4W is the hydromechanical resonant frequency of the load and cylinder with the four-way connection,
ρC is the area ratio of the cylinder, cap end area divided by rod end wetted area.
To appreciate the significance of this equation, consider a rather conventional cylinder with a rod diameter that is one-half the bore: for example, a 4-in. bore and a 2-in. rod diameter. Such cylinders always have a cylinder area ratio, ρ, that is 4/3, or about 1.333. When this is substituted into the equation above, we find that the same cylinder with the same load, will have a resonant frequency in the regeneration configuration that is 7.5 times lower (0.132) than if connected in the four-way configuration! It follows directly that the acceleration time will likewise have to be 7.5 times longer! This can have a devastating effect on machine productivity.
System designers operate at their own peril when they fail to calculate the hydromechanical resonant frequency of their systems. This is true even if regeneration is not an option.
Textbook provides all-encompassing study of closed-loop electrohydraulic control
For more information on this and other books on hydraulics and electrohydraulics visit the H&P Bookstore by clicking here.
- covers everything from fundamental hydraulic circuit analysis to dynamic testing of motion control systems,
- is packed with more than 500 pages of useful formulas and dozens of fully worked examples, and
- contains 20 chapters covering hundreds of topics, including components, systems, circuit analysis, modeling, servomechanisms and control, simulation, and testing.
