Fine Resolution Provides Precise Positioning
Feedback transducers are necessary components of closed-loop fluid power control systems, and a wide range of price and performance options is available for position-measuring transducers. High resolution feedback devices, such as magnetostrictive linear displacement transducers (MLDTs) can provide resolution close to one µm.
Glass scale incremental encoders can provide resolutions to fractions of microns. Even if not needed to achieve the accuracy requirements of a system design, finer transducer resolution may be required by closed-loop motion control applications to provide velocity and acceleration feedback for proper tuning or smooth gearing applications, where the motion of a slave axis is proportionally related to the motion of a master axis.
The usual thought when designing a motion control system is that you need just a little more resolution than what is required by the application's positioning requirements. This view may be correct for relatively simple applications involving continuous or start-stop motion, but it is often not true for those involving dynamic conditions. The need for finer resolution increases for applications requiring accurate velocity or acceleration measurements to be factored into the control algorithm.
In gearing applications, the master axis feedback should have as high a resolution and accuracy as possible so the slave axis (or axes) can follow a smooth motion profile. Machines that move very slowly also need high resolution position feedback so that the motion controller can detect changes in position each time the control loop is executed. This allows the control algorithm to decide if the axis is really moving as intended.
In addition, for machines that need to accelerate quickly — or that depend on maintaining tight control over actuator velocity — any delay time between reading the position and sending the data to the motion controller can introduce error. Transducers that convert physical conditions (such as position) into electronic data (such as SSI) must handle the data quickly and consistently.
Synchronous Serial Interface (SSI) is a standardized, all-digital, point-to-point interface. It provides unidirectional communication of absolute positioning information at speeds to 1.5 MHz from devices such as MLDTs or absolute rotary encoders. SSI uses differential RS422-type signals for high noise immunity and can provide limited error-checking via double transmission and a parity bit.
Resolution and velocity error
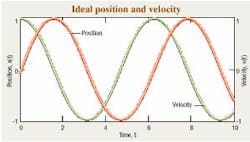
For a perspective on the importance of controlling dynamic system performance, consider a controller with a control loop update time of 0.001 sec and a feedback device providing one integer position count for every 0.001 in. of change in distance, Figure 1. The controller calculates the speed using the difference between two feedback readings and divides the difference in distance by the time between the two readings. The velocity at time n is calculated as:
Vn = (Pn Pn-1) 0.001 sec, where
Vn is velocity at time, n
Pn is position at time, n
Pn-1 is position at the previous control reading.
By working through the numbers, you should see that velocity will always be an integer measured as in./sec. This may be fine if the machine is only moving steadily and using integer velocities. But what if controlling the velocities during acceleration and deceleration ramps are important? What if there is a need to control speed at 0.5 in./sec? In these cases the feedback will always indicate that a velocity error exists even though the true velocity error may be zero. In slow-moving machines with insufficient positioning resolution, control updates may be so fast relative to the change in position feedback that the control loop may not even detect a change in position from one scan to the next. This results from calculating an erroneous zero velocity.
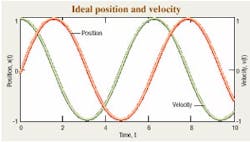
The velocity errors just described are not a continuous value, but, rather, are due to the position feedback being quantized — which means positions are read at discrete loop time intervals. Figures 1 and 2 show how much of the error in calculating the actual velocity is due to these quantizing errors.
Figure 1 shows ideal position and velocity over time for a particular motion system design. The derived velocity is quite smooth compared to the velocity shown in Figure 2, which shows the effect of rounding the positions to 0.001. This is done to simulate a feedback device with a resolution of only 0.001.
It is not so easy to see the difference between the position plots in the two graphs. You may be able to get by with the resolution reduced to 0.001 if a machine only needs to maintain a steady state position. However, it is easier to see that the derived velocity becomes very coarse, or quantized, because of the lower position resolution. In the real operations world, electronic gearing applications — and those control systems that use the derivative gain to provide stability — will suffer in repeatability because accurate velocity calculations are critical.
The derivative gains are used in PID control systems where electronic damping is necessary to make the system more stable. A control system's derivative gain is a gain applied to the error between the rate of change in the target position (the target velocity) and the rate of change in the actual position (the actual velocity). The derivative gain is often underutilized in control systems because it is considered to be noisy. This "noise" often is caused by the coarse resolution of the feedback signal and can be reduced by using a feedback device with higher resolution.
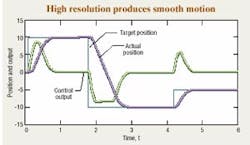
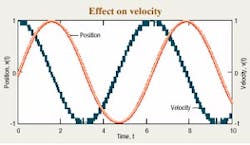
Figures 3 and 4 show the difference between two identical closed-loop systems except for the resolution of the feedback devices. Figure 3 shows the simulated feedback with a resolution of 0.001 in. Notice the control output signal, the green line, is relatively smooth. Figure 4 is a graph of the same sequence of moves with the exact same control loop gains. However, the feedback resolution has been reduced to 0.01 in.
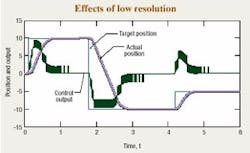
Notice that the control output of Figure 4 changes in much bigger steps and that it appears to look like noise. This "noise" will not affect a simulation much, but a real system could become uncontrollable with the output varying a couple of volts in each scan. Although it appears to be noise, the output is due to the derivative term using a low-resolution feedback which, in turn, can only calculate coarse or 'noisy' velocities as shown.
Resolution and gearing applications
Another class of applications that requires high resolution is electronic gearing. The controller generates motion profiles for the slave axes that follow positions and velocities derived from the master encoder or master feedback device. If the master feedback device has low resolution, then the motion profile the slave will follow must also have low resolution. Therefore, it will not be smooth. If the master feedback is not smooth, it may be impossible to use feed forward gain or the derivative gain. This will result in limiting the dynamic response of the slave and its ability to truly gear to the master.
Filtering — Filtering can be added to smooth out the electrical noise and quantizing errors. However, there is a tradeoff. The tradeoff is that filtering adds a delay proportional to the rate of change (phase lag) to the system, thereby reducing controlability. Filtering can be added to the master feedback device when gearing to smooth out the target for the slave. Unfortunately, doing so introduces tracking errors during master speed changes.
Conclusions
High resolution position feedback devices should be used in motion control applications that move slowly or must exhibit quick acceleration or deceleration ramps. They should also be used for axes that need electronic damping (more than just the P in the PID control).
In addition, high resolution feedback is a requirement for master/slave gearing or electronic camming — applications where the master's feedback must generate smooth motion profiles for the slave axes. Fortunately, many of today's transducers can provide position resolutions down to one micron, giving controllers more ability to achieve faster and smoother machine motion.
The sensor of choice for cylinder position feedback
• Signals can be processed rapidly, yet have high resolution.
• Because it is inside the cylinder, the MLDT does not require additional space alongside the cylinder.
• The magnet does not contact the sensor tube, so mechanical wear does not occur.
• In-cylinder mounting protects the MLDT from potential damage in hazardous applications.
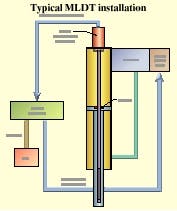
MLDTs determine stroke position of a hydraulic cylinder by measuring the distance from a fixed sensor head to a movable magnet, which rides over a fixed sensor tube attached to the sensor head. For hydraulic cylinder applications, a bore is usually drilled down the center of the piston rod, enabling the waveguide tube to fit inside it. The magnet is embedded in the piston, so as the piston rod extends or retracts, the magnet moves with it, thereby generating a signal representative of piston position.
The MLDT (which is rated to handle the heat and pressure of the hydraulic fluid) measures absolute position, so homing is un-necessary. The controller reads the actual position as soon as power is applied, which greatly simplifies programming. Advances in MLDTs have led to resolution down to 1 µm, and much smaller sensor heads, both of which expand their usefulness.
Peter Nachtwey is president of Delta Computer Systems Inc., Vancouver, Wash. Contact him at [email protected] or visit www.deltamotion.com
