Electrohydraulic system exhibits cat-like reflexes
Fievel’s Playland, at Universal Studios in Orlando, Fla., contains a half-acre of giant props and sets re-creating scenes from the animated feature films “An American Tail” and “An American Tail: Fievel Goes West.” Everything here is big, to present the world from the perspective of Fievel the mouse.
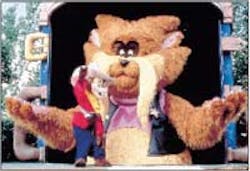
Children visiting the area can navigate a 200-ft water ride, crawl through a gigantic cowboy boot, leap into a campfire skillet, and slide down the horn of a huge oldtime phonograph. But probably the most impressive sight to the young visitors is looking up at a moving, talking cat nearly two stories tall, Figure 1. Enter Fievel’s best friend, Tiger the cat. This 16-ft tall animated figure not only performs, but converses and interacts with the audience during the “Fievel Goes West Musical Revue.” Designed and built by Advanced Animations, Stockbridge, Vt., to meet the stringent requirements of Universal Studios Florida, the character moves with lifelike smoothness and precision, thanks to sophisticated electrohydraulics.
All of the drives have to be located inside the body of the cat, so space is at a premium. Hydraulic actuation was chosen for most of the moves because of its high power density, ability to carry heat away from the work area, and ability to interface with digital equipment for a variety of precisely controlled motions. Pneumatics is used for generating motion in lightly loaded members that require only start-stop type motion — such as facial and paw movements.
A total of 11 different motions are accomplished by electrohydraulic valves driving cylinders and rotary actuators:
• waist turn
• waist bend
• head turn
• head nod
• head tilt
• left forearm up, down
• right forearm up, down
• left shoulder up, down
• right shoulder up, down
• left forearm in, out, and
• right forearm in, out.
In many cases, actuators are positioned in the torso of the figure with mechanical linkages connecting the cylinder rod end to the member being moved. Because many motions occur in the head and neck region, a number of actuators, linkages, and hoses must be located in or near this area. To make best use of space, a rotary actuator turns the head left and right. All other hydraulic motions are achieved with cylinders.
The first seven motions are controlled by high-response proportional valves with onboard electronics. The last four are controlled by servovalves using external valve driver electronics. Position feedback is provided by linear potentiometers on the cylinders and a rotary potentiometer on the rotary actuator.

Removing an access panel from the back of the figure reveals the hydraulic manifolds that contain the valving, Figure 2. The character uses a 7-station manifold for the proportional valves and two smaller manifolds, each containing two servovalves, for the motions described above. Hydraulic hose runs from the manifolds to the actuators, which are accessed through the opening.
Lifelike motions
Advanced Animations identified primary design factors as load specifications, motion geometry and dynamics, and locations within the figure where actuators could be positioned. A computer- generated analysis was used to determine the optimum valve/actuator combinations for each motion.
To meet the expectations of Universal Studios Florida, animation engineers at Advanced Animations wanted Tiger’s movements to look as humanlike as possible. To accomplish this, the four functions controlled by the servovalves employ a compliant electrohydraulic motion control configuration that not only commands a particular motion, but also regulates force applied by the cylinders. Doing so allows executing one movement while taking into account other movements occuring simultaneously. This prevents the figure’s motion from having a mechanical, jerky look.
Compliant servo hydraulics involves adding a second control loop inside the position feedback loop, the second loop being force feedback within the joint itself. The servovalves are made compliant by adding load cells and electronics to monitor force feedback. The result is very smooth, lifelike motion. Compliance is important in the shoulder movements because each arm is suspended from the shoulder and acts as a cantilevered beam. Consequently, if the shoulder motion starts or stops suddenly, the elasticity of the arm structure would allow the arm to oscillate at its free end. With compliance, the electronic control system regulates cylinder force and position to prevent any such irregular motion from occurring.
Moreover, compliance smooths out motion by monitoring force even when the shoulder joint is stationary. For example, if the elbow joint moves the forearm, a reaction torque from the accelerating or decelerating mass of the forearm is transmitted to the shoulder when the forearm starts or stops. Even though the shoulder joint has not moved, the arm will tend to oscillate at its free end as a result of the forces acting on the end of the cantilevered upper arm. The force feedback loop senses the reaction force at the shoulder, and control electronics command the servovalves to act accordingly to keep the arm from vibrating. The compliant joint “gives a little” to absorb shock that would otherwise be created if compliance was not used. This effect can be fine-tuned by the electronic control system for maximum effectiveness.
Electronic control
Tiger’s performance is choreographed using a computerized control system designed by Advanced Animations. It first takes analog input signals that determine the various movements, stores them digitally, and then outputs digital and analog control signals to the electrohydraulic system to operate the animated figure.
This digital motion information can then be recorded and stored for playback on digital tape, compact disc, or laser disk. During playback, digital and analog output signals are sent in real-time to the animated figure. The operator, who views the action from a remote control room by means of a video monitoring system, can also override the pre-recorded motions and directly control the character in realtime by using a joystick. The ability to control the character manually is important, because a number of real actors and members of the audience invited to participate in the show interact with the animated figure on stage.
Hydraulic power systems
The hydraulic system uses a remote power unit with an accumulator to maintain constant pressure. The flow rate was selected so that all 11 functions can operate simultaneously at peak velocity without pressure loss. The system is designed to run at pressures to 1000 psi.
The Tiger animated figure moves forward into show position on a mobile platform. Two hydraulic hoses (for pressure and return), several electronic cables, and compressed air lines run as umbilical cords to the figure. These are hidden from the view of the audience by the stage.
Most visitors to Fievel’s Playground do not realize the amount and complexity of hydraulic, pneumatic, mechanical, and electrical engineering it takes to bring Tiger to life . . . and that’s how it should be. What really matters is the fun they have watching the show and sometimes becoming part of the show with a big cat whose movements appear as real as those of the live actors and audience members.
Bert Martinez, C Mfg Eng, is electrohydraulic application engineer, Parker Hannifin Corp., Fluidpower Group, Fairfield, N. J. The Hope Group, Northborough, Mass., a Parker distributor, assisted in the project.

{kind=link}